

Вчені Швейцарії показали нову технологію, яка дозволить досліджувати капіляри без інвазивних методів
У Федеральній політичній школі Лозанни у Швейцарії ( EPFL) доктор філософії Лусіо Панкальді та доцент Селман Сакар , використали гідрокінетичну енергію (механічну енергію, що виникає внаслідок руху рідин), щоб потрапити в місця людського тіла, не вдаючись до інвазивних методів. “Великі ділянки мозку донині залишаються недоступними для лікарів, оскільки сучасні інструменти є громіздкими, і вивчення крихітної, хитромудрої мозкової судинної системи без пошкодження тканин надзвичайно важко”, – говорить Сакар.
Лікарі можуть отримати доступ до артерій пацієнтів, штовхаючи та обертаючи напрямні дроти, а згодом і рухомі порожнисті трубки, які називаються катетерами. Однак, коли артерії починають звужуватися, особливо в мозку, ця техніка просування є не припустимою. Вчені лабораторії MicroBioRobotic Systems (MICROBS) EPFL, співпрацюючи з колегами з групи професора D. Ghezzi’s, спроєктували прив’язані мікроскопічні прилади, які можна вводити в капіляри з безпрецедентною швидкістю та легкістю. “Наша технологія призначена не для заміни звичайних катетерів, а для їх кількісного збільшення”, – говорить Панкальді.
Пристрої складаються з магнітного наконечника та ультрагнучкого корпусу з біосумісних полімерів. “Це для прикладу як, рибний гачок, що поступово випускається у річку. Він буде переноситися кров’яним струмом. Ми просто тримаємо за один кінець пристрою і даємо можливість крові тягнути його до найбільш периферичних тканин. Ми акуратно обертаємо магнітний наконечник пристрою на біфуркації для вибору конкретного шляху “, – говорить вчений. Оскільки безпосередньо на стінку судини не застосовується механічна сила, ризик заподіяння шкоди дуже низький. Більш того, використання кровотоку може скоротити час операції з кількох годин до декількох хвилин.
І випуск пристрою, і магнітне рульове управління знаходяться під контролем комп’ютера. Крім того, нема потреби у зворотному зв’язку, оскільки кінчик пристрою не штовхається об стінки судини. “Ми можемо передбачити, що хірургічний робот використовуватиме детальну карту судин, надану за допомогою МРТ та КТ пацієнта, для автономного спрямування приладів до цільових місць. Додавання машинного інтелекту трансформує ендоваскулярні операції. Альтернативно, використовується візуальна інформація, яку надає флюороскоп, для локалізації пристрою та обчислення траєкторії в режимі реального часу для полегшення ручних операцій “, – говорить Сакар.
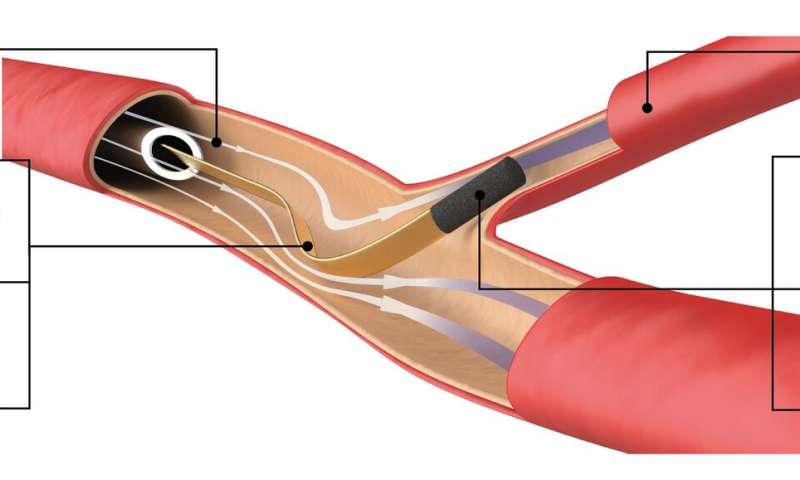
Схематичне зображення, показує особливості навігації, керованої потоком. Гідрокінетична потужність використовується для приведення в дію шприц-ін’єкційних мікроскопічних зондів, що забезпечує автономну навігацію та уникнення перешкод. Магнітні поля забезпечують керування для бездротового доступу до цільових артерій.
Дослідники з Інженерної школи EPFL випробували цей пристрій у штучних системах мікросудин. Наступний етап включатиме випробування на тваринах із найсучаснішими медичними системами візуалізації. Вчені також сподіваються розробити інші пристрої з низкою вбудованих приводів та датчиків.